實時(shí)與精準的(de)完美(měi)結合----海(hǎi)得(de)控制(zhì)e-Control PLC運動控制(zhì)$模塊
發布時(shí)間(jiān):2015-09-10為(wèi)了(le)滿足工(gōng)業(yè)系統日(rì)益複雜(zá)的(de)控制(zhì)要(yào)求,海(hǎi)得(de)控制(zhì)近(jìn)年(nián)來(lái)在e-Control PLC的(de)自(zì)動化(huà)平台基礎上(shàng)¶,不(bù)斷開(kāi)發出更多(duō)功能(néng)模塊,從(cóng)高(gāo)速計(jì)數(shù)模塊©、溫度控制(zhì)模塊、遠(yuǎn)程I/O模塊,到(dào)通(tōng)信模塊、運動控制(zhì)模塊等。如(rú)今,e-Control PL✘C以豐富的(de)控制(zhì)功能(néng)、開(kāi)放(fàng)式通(tōng)信接口及分(fēn)布式模塊系統±架構,廣泛應用(yòng)于制(zhì)藥、輪胎、空(kōng)調、紡機(jī)、水(shuǐ)處理(lǐ)、光(guāng)伏、LED等行(xíng)業(yè)。Ω
針對(duì)中國(guó)伺服控制(zhì)市(shì)場(chǎng)的(de)快(kuài)速增長(cháng),海(hǎi)得(de)控制(zhì)成功開(kāi)發出高(δgāo)精度運動控制(zhì)模塊EH10-MC001。它能(néng)同時(shí)控制(zhì)4個(gè)伺服馬達或步進馬達的(de)運動(其中任意3軸聯動),以 脈沖串形式輸出,實現(xiàn)對(duì)伺服馬達和(hé)步進馬達的(de)位置控制(zhì)、插補驅動、速度控制(zh©ì)。适用(yòng)于切割、印刷、包裝、搬運、紡織、醫(yī)療、加工(gōng)、雕銑等設備,以及自(zì)動流水(shuǐ)線、工(gōng)業(yè)機(jī)器(qì)人(★rén)等多(duō)種場(chǎng)合。
運動控制(zhì)模塊EH10-MC001功能(néng)特點:
◊ 獨立4軸驅動
◊脈沖輸出可(kě)選擇:脈沖+方向、雙脈沖方式
◊編碼器(qì)輸入可(kě)選擇:AB相(xiàng)、雙脈沖方式。
◊速度控制(zhì)和(hé)位置控制(zhì)
◊ 2軸/3軸直線插補、圓弧插補、連續插補、電(diàn)子(zǐ)凸輪功能(néng),固定線速度控制(zhì)
◊位置管理(lǐ)及軟件(jiàn)限位功能(néng)
◊實時(shí)監控功能(néng)
◊接收伺服馬達各種信号
◊搜尋原位輸入
◊提供豐富的(de)開(kāi)發方式:梯形圖編程、G代碼編程、開(kāi)放(fàng)式客制(zhì)化(huà→)開(kāi)發環境。
應用(yòng)案例-印刷設備
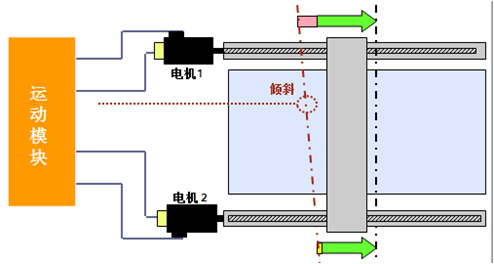
在數(shù)碼印刷設備中,利用(yòng)機(jī)器(qì)視(shì)覺獲取紙(zhǐ)張的(de)位置及偏差數(shù)據。運動模塊通(tōng)過$2軸直線插補進行(xíng)紙(zhǐ)張傳送,在插補過程中進行(xíng)左右及角度糾偏。整個(gè)設備3軸聯動控制(zhì),并與牙排位置準确同步。紙(zhǐ)張與牙排同步啓動,當牙排打®開(kāi)時(shí),紙(zhǐ)張正好(hǎo)送入牙排中。之後牙排夾住紙(zhǐ)張,傳送機(jī)構往回運動,α準備傳送下(xià)一(yī)紙(zhǐ)張。
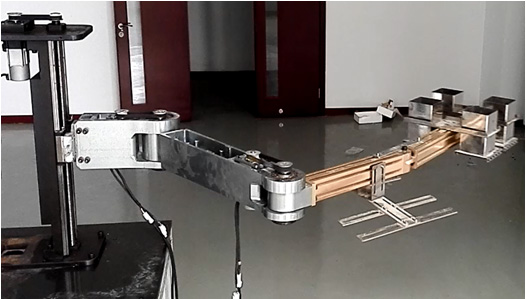
應用(yòng)案例-機(jī)器(qì)手臂
在注塑機(jī)器(qì)手臂中,通(tōng)過參數(shù)設定或位姿學習(xí)方式,記錄手臂>運動軌迹。運動控制(zhì)模塊根據軌迹,并通(tōng)過機(jī)器(qì)手臂正反解算(suàn)法,産生 (shēng)連續小(xiǎo)線段數(shù)據,調用(yòng)連續插補功能(néng)驅動伺服完成Ω特定軌迹運動。