



産品包裝标簽自(zì)動糾偏解決方案
發布時(shí)間(jiān):2016-05-19案例簡介:
随著(zhe)人(rén)們生(shēng)活的(de)豐富,需要(yào)豐富的(de)禮品盒,食品盒等,而且禮品盒有(yǒ¥u)不(bù)同的(de)規格,需要(yào)精美(měi)的(de)包裝,但(dàn)是(shì)目前市(shì)面上(shàng)的(de)禮品盒裝配設備存在一(y±ī)些(xiē)缺點:
1:柔性化(huà)不(bù)足:全機(jī)械設計(jì),導緻一(yī)種機(jī)械模隻能(néng)适應一(yī)種盒子(zǐ),柔性化(huà)不(bù)足。
2:精度較差:純機(jī)械的(de)設備沒有(yǒu)供應一(yī)側的(de)精度糾正。
3:速度慢(màn)。
為(wèi)了(le)解決以上(shàng)問(wèn)題,我們幫助客戶設計(jì)如(rú)下(xià)方案:
1:采用(yòng)機(jī)器(qì)視(shì)覺來(lái)采集來(lái)料的(de)位置,實時(shí)發送給PLC。
2:采用(yòng)運動控制(zhì)器(qì)+全伺服控制(zhì)提高(gāo)系統的(de)定位精度達到(dào)0.01mm,客戶原來(lái)0≠.5MM.
3;全伺服系統可(kě)以使得(de)系統提到(dào)到(dào)原來(lái)的(de)5倍速度。
系統方案機(jī)械架構:
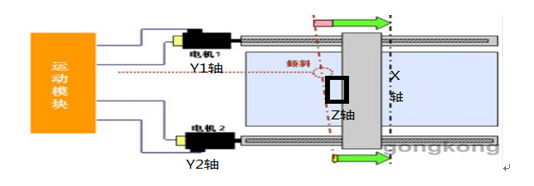
系統糾偏原理(lǐ):CDD1和(hé)CCD2分(fēn)别把對(duì)應紙(zhǐ)盒的(de)角度,X坐(zuπò)标和(hé)Y坐(zuò)标測試出來(lái),發送給PLC,然後由PLC控制(zhì)Y1,Y2和λ(hé)X軸伺服進行(xíng)角度和(hé)坐(zuò)标的(de)糾偏補償,Z軸此時(shí)負責盒子(zǐ)的£(de)準确下(xià)送。
控制(zhì)系統拓撲圖:
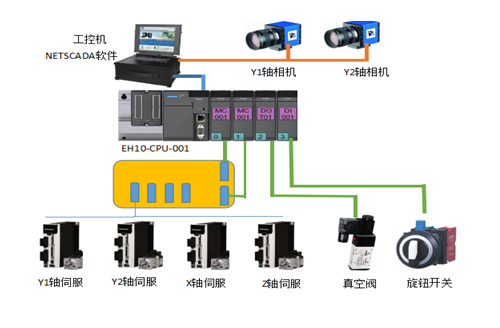
系統配置和(hé)控制(zhì)方案:
1:本系統采用(yòng)EH10-CPU-01+MC001+CCD,上(shàng)位機(jī)和(hé)視("shì)覺部分(fēn)采用(yòng)NETSCADA軟件(jiàn)。
2:控制(zhì)方面采用(yòng)了(le)MC-001的(de)直線插補和(hé)插補數(shù)據∏追加,Z軸和(hé)Y1和(hé)Y2的(de)應用(yòng)實現(xiàn)了(le)代替機(jī)械凸輪運行(xíng)方式,提高©(gāo)了(le)系統柔性化(huà),提高(gāo)系統的(de)精度達到(dào)0.01mm和(hé)速度(1個(gè)/s)。
3:視(shì)覺糾偏可(kě)以達到(dào)0.005的(de)精度等級.
4:本系統是(shì)典型的(de)直角坐(zuò)标控制(zhì)應用(yòng),可(kě)以實&現(xiàn)我們類似的(de)直角坐(zuò)标應用(yòng)。




